Robot suiveur de ligne
Étude, conception, routage et fabrication d'une carte électronique pour un robot suiveur de ligne - du cahier des charges aux tests.
ERS1 signifie « Études et Réalisations du Semestre 1 ».
Résumé du projet
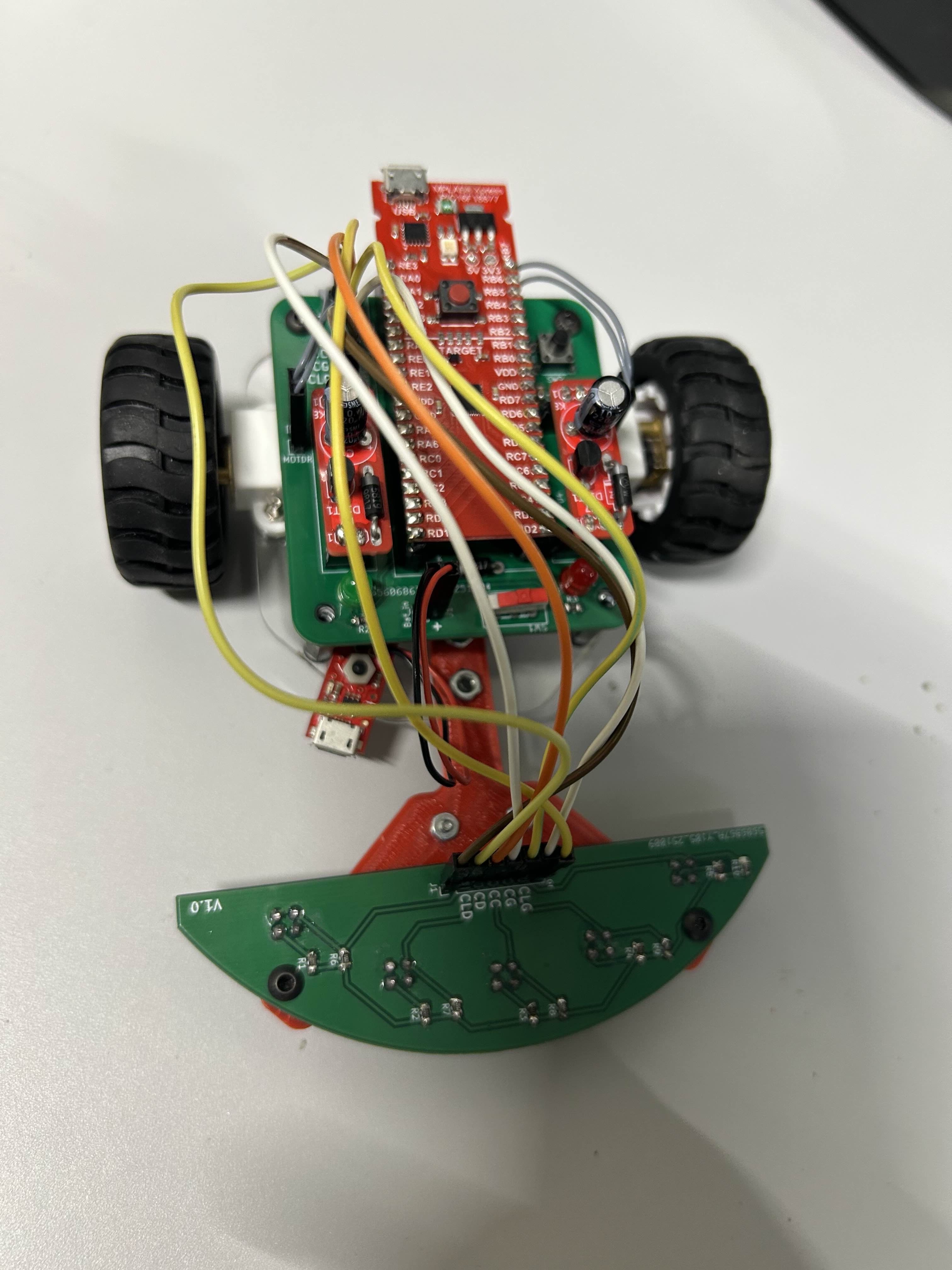
Ce projet ERS1 du département GEII a pour objectif de concevoir et réaliser une carte électronique permettant de piloter un robot suiveur de ligne. Le montage est étudié de A à Z : cahier des charges, étude fonctionnelle, dimensionnement des composants, routage du circuit imprimé, fabrication et tests.
Le robot utilise des capteurs optiques pour détecter une ligne au sol, des moteurs à courant continu, ainsi qu'une électronique analogique (amplificateurs opérationnels, transistors, etc.) pour le pilotage.
Points clés du projet
Navigation dans le rapport ERS1
Technologies & outils utilisés
Électronique
Conception des résistances et schématisation de la breadboard.
CAO électronique
Saisie de schéma sous KiCad et programmation sous MPLAB X IDE.
Robotique mobile
Capteurs optiques CNY70, châssis, moteurs DC.
Mesures & tests
Multimètre, alimentation de labo, mesure théorique et vérification.
Compétence principale
Concevoir
Étudier les fonctions, dimensionner les composants et router une carte cohérente, du schéma au circuit imprimé.
Vérifier
Multimètre, alimentation de labo, mesure théorique et vérification du fonctionnement.