Étude du montage
Étude du principe de fonctionnement, du châssis, des capteurs et de la connectique.
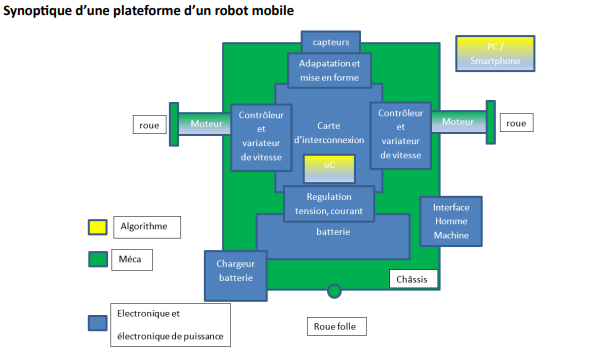
Principe d'un robot suiveur de ligne
Le robot suiveur de ligne avance grâce à deux moteurs indépendants. Il détecte la ligne au sol (noire ou blanche) à l'aide d'une LED infrarouge et d'un phototransistor. Selon la quantité de lumière infrarouge réfléchie, le capteur mesure une variation de courant :
- une surface blanche reflète fortement l'infrarouge (le phototransistor reçoit plus de lumière)
- une surface noire absorbe l'infrarouge (le phototransistor reçoit moins de lumière)
En fonction de cette différence, le robot ajuste automatiquement la vitesse de chaque moteur pour corriger sa trajectoire et rester aligné sur la ligne.
Étude des différentes fonctions
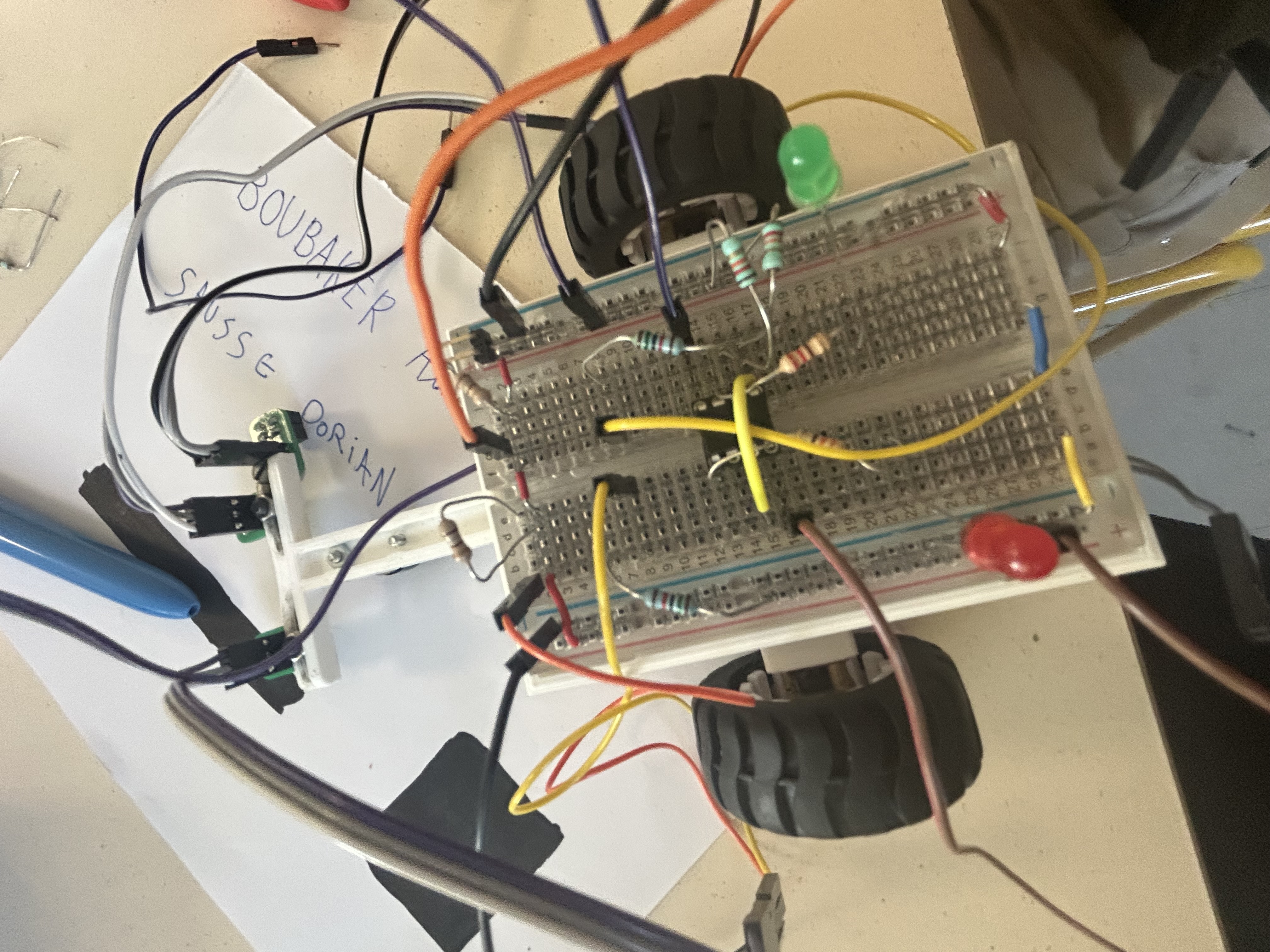
Le montage est décomposé en plusieurs fonctions électroniques. Chaque fonction correspond à une partie mécanique, optique ou électrique nécessaire au fonctionnement du robot. (comme l'image ilustratif du robot le montre), nous avos deux partie controleur / variateur de vitesse relier au moteur. Ces deux partie sont eu méme relier a la carte mère robot (PCB) relier a la puce controleur .
1 – Le châssis
Le châssis est la partie mécanique principale du robot. Il sert à supporter :
- la carte électronique,
- les moteurs,
- la connectique d'alimentation,
- les capteurs optiques,
Et tout ce qui sera sur le robot.
L'ensemble des signaux moteurs et capteurs est raccordé à un connecteur 6 points sur le devant du robot.
2 – les composants de détecteur de ligne
Le système de détection de la ligne noire sera placé sur une excroissance à l'avant du robot. Il est positionné de manière à être le premier élément à recevoir l'information, afin de transmettre rapidement les données aux moteurs. Ainsi, le capteur détecte la ligne noire avant que le robot n'avance trop loin. De quoi est fait ce systéme a l'avant ? En théorie, trois capteurs optiques à réflexion. Pour la première partie du projet, seuls les deux capteurs extérieurs sont utilisés (un capteur n'est pas utiliser) et pour la suite du projet apres conception du PCB , on passe de 3 capteur a 5 capteur , deux de chaque coter et un au milieu. Ce sont des capteur optique réfléchissant avec sortie transistor, reférence CNY70 .
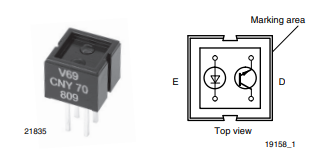
Chaque capteur comporte une LED infrarouge et un phototransistor dont la résistance varie en fonction de la lumière réfléchie.
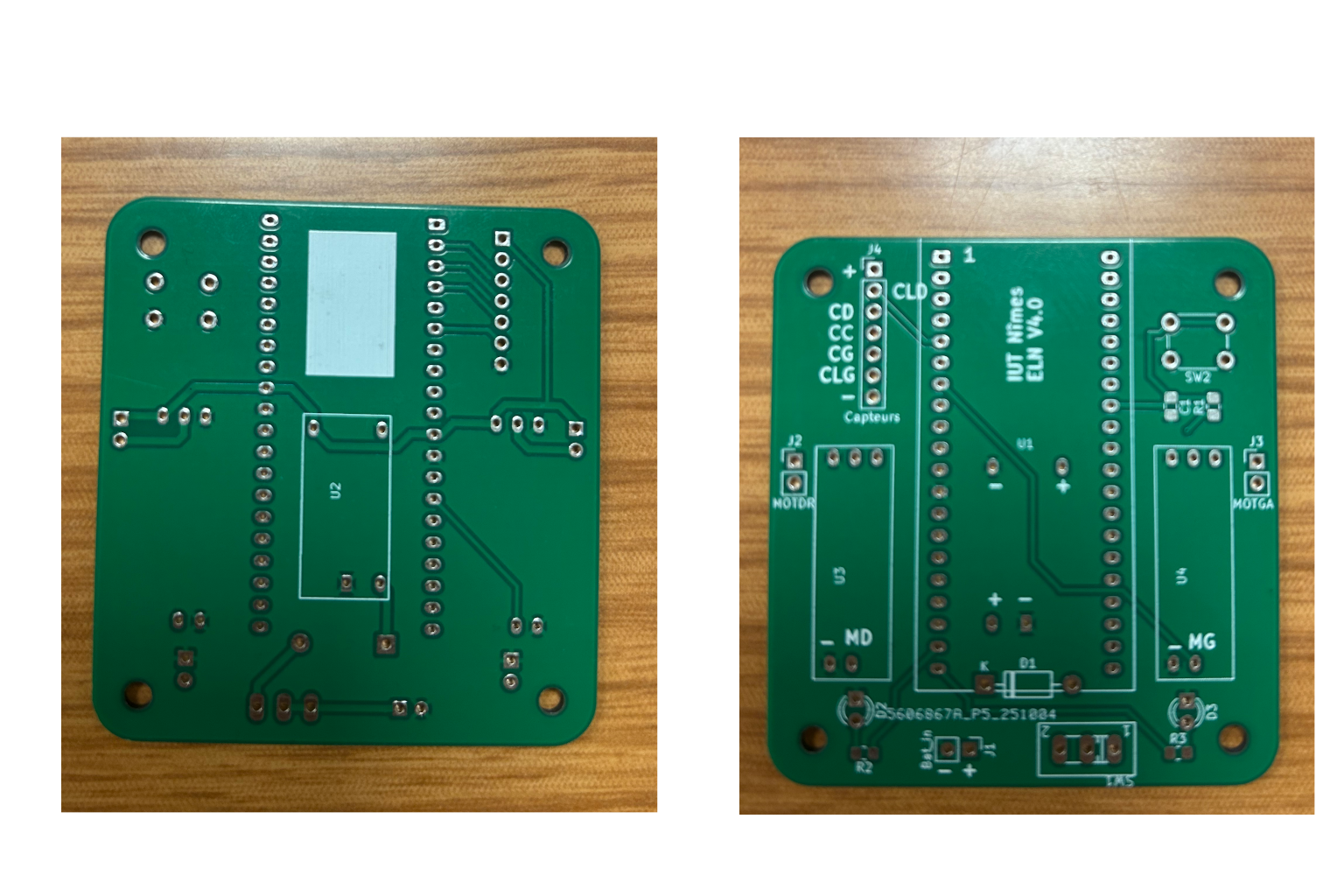
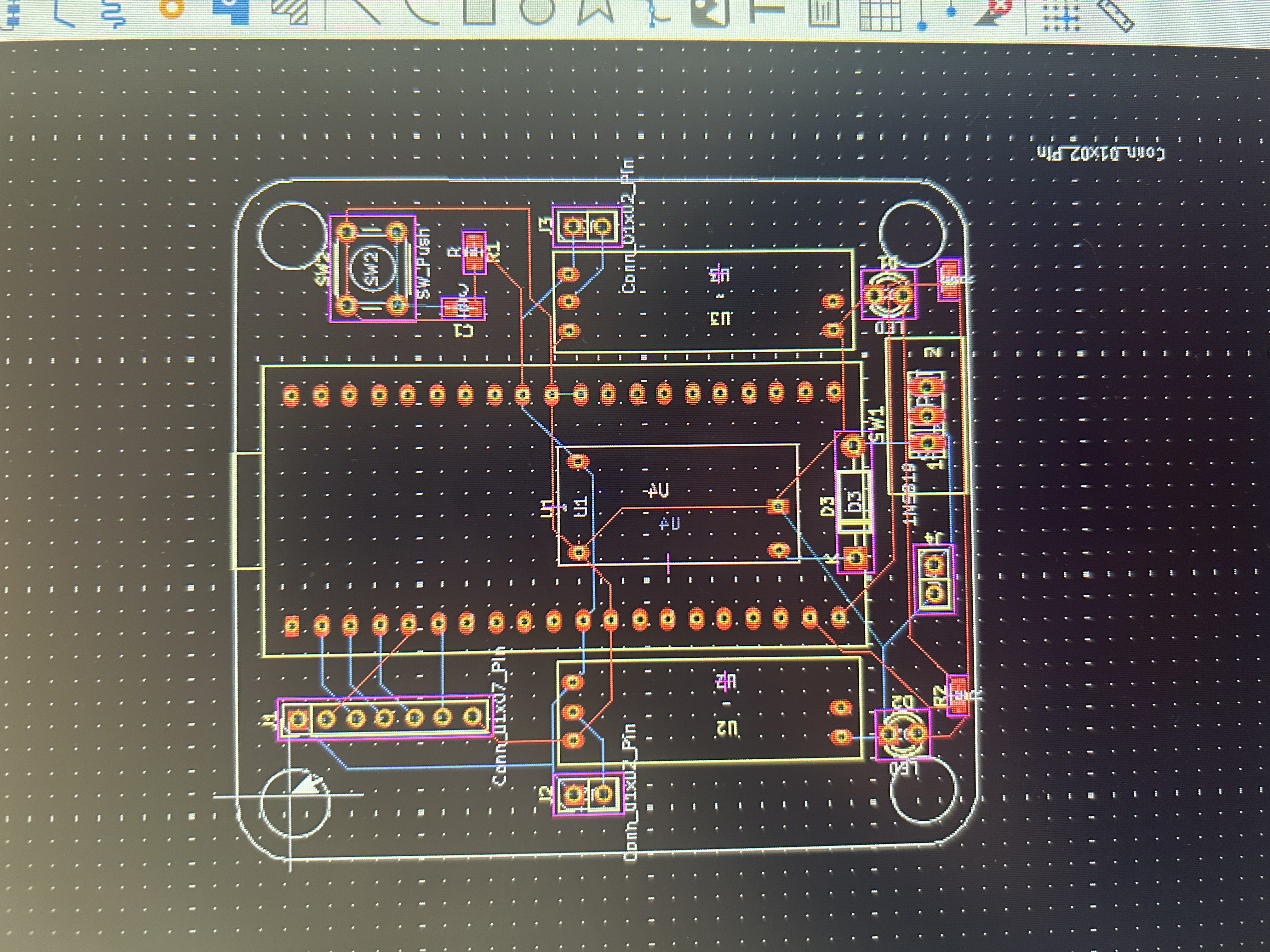
La connectique
La connectique permet de relier ensemble les différentes fonctions. On utilise une PCB faite par no soins grace au logiciel KiCad.
Certaines liaisons sont critiques sur la breadboard, notamment la liaison entre les capteurs infrarouge et la carte contrôleur. La connectique est une contrainte importante, car elle impose l'orientation et la position des pistes du circuit imprimé avant méme d'avoir deja penser a la création du PCB.